This is the final project for my Microprocessor Interfacing class. Another student and
I took an old RC car and modified it to drive autonomously down the hallway. The car wasn't
very smart yet when we took this video. Unfortunately the semester ended before we could make
significant improvements.
The basic idea was to use three IR proximity sensors to feed information into the processor.
The processor would then decide what signal to output to the steering servo and the drive motor.
An accelerometer was also used to detect accidental collisions.
A grad student that I was working with started a project to design a low-cost robotics kit that could be
used to control simple robots like my RC car. The main goal was to build a robotics kit that could be used to teach the basic concepts of robotics.
I'm helping to develop the project further. For more information (I did not build the robot in
this next video):
LowCostRobotics.wordpress.com.
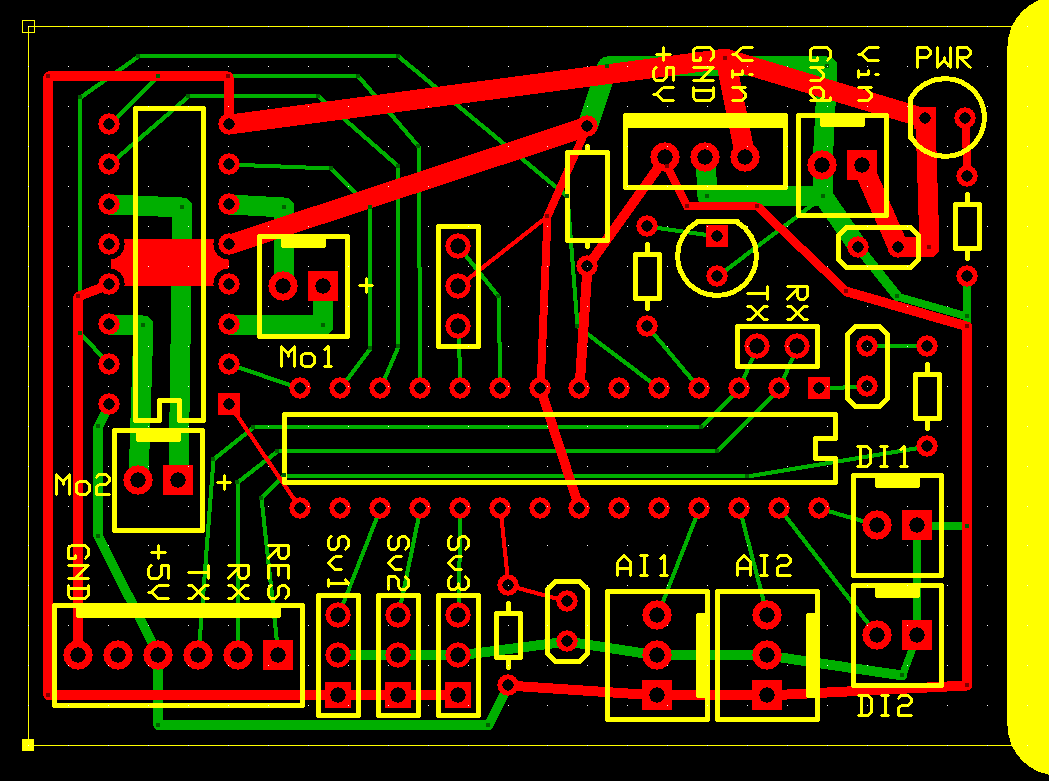
This is an image of the circuit board that I designed for the project. Designing simple circuits is a lot
like solving puzzles with several special rules.
After I designed the board I soldered the components on and began testing the board. I wrote an assembly guide
along with a programming guide. This guide explains how to use the standard Arduino functions
and how to use a few Arduino Libraries that I have written specifically for the newly designed board.
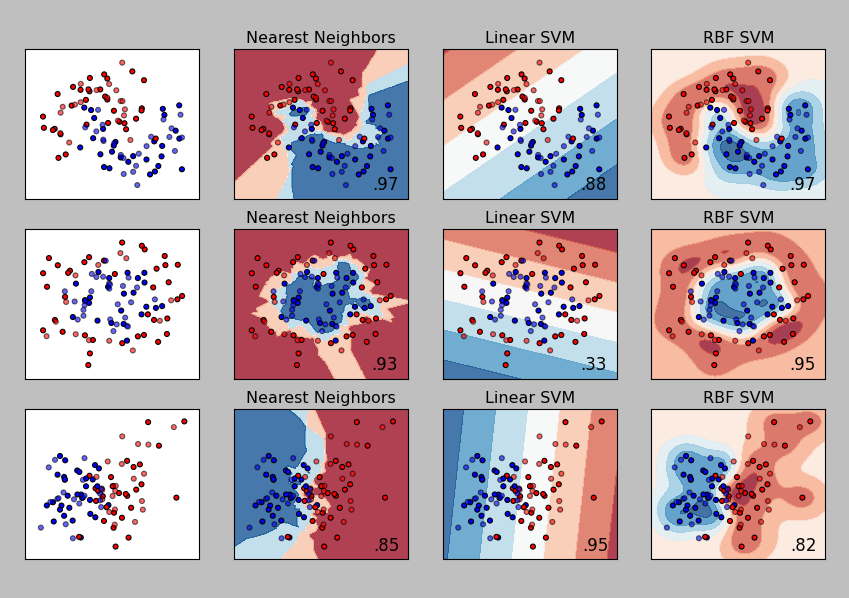
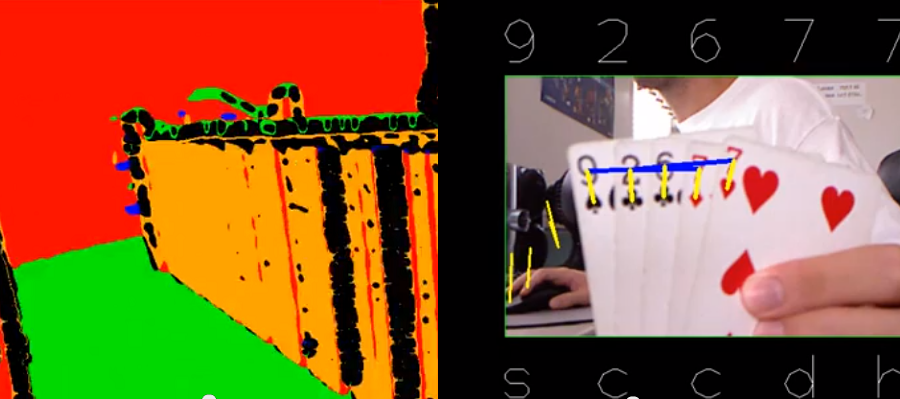
OpenCV | SciKit-Learn
Computer Vision and Machine Learning are both important subjects to know for advanced Robotics. Fortunately
other people have written open-source Python Modules for these two subjects that anyone can use.