Vehicle Dynamics
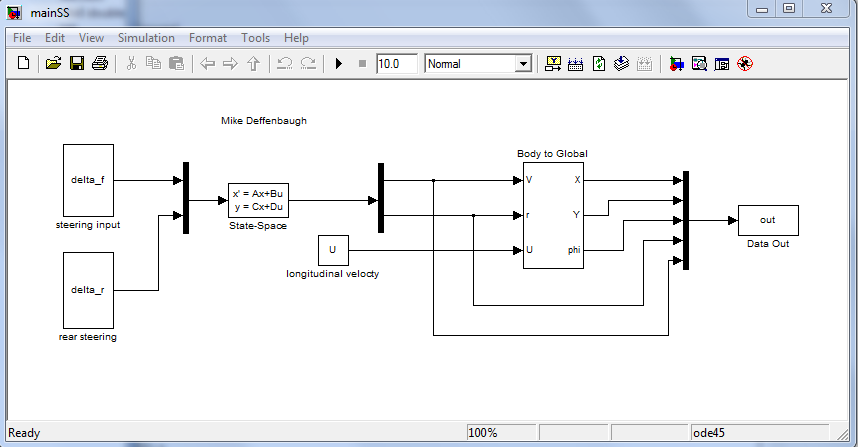
In my senior year I took a course on Vehicle Dynamics because I've been very interested in cars for most of my life and I had enjoyed the other required dynamics courses I had taken so far. While taking the course I completed assignments where we had to create Simulink models of vehicle systems such as this simple one shown below.
Here are the results of one such simulation where a steering input (which went from left to right) was applied to a vehicle and the speed was varied. The plot is a bird's eye view showing X and Y coordinates of the vehicle's movement. The three different speeds were set directly at, above, and below the critical speed for this particular car. This critical speed caused oversteer in the vehicle. The red line shows the car doing two donuts and the blue line shows the car going left and then right which is similar to the given steering input.
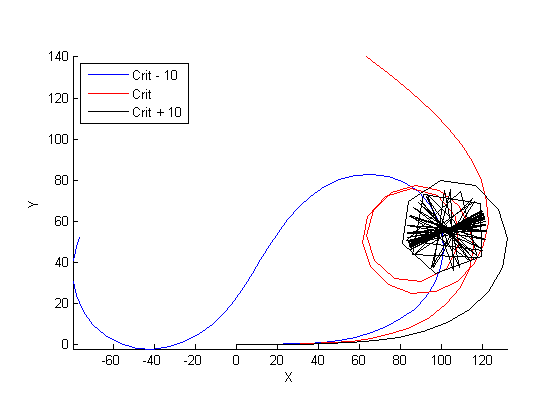
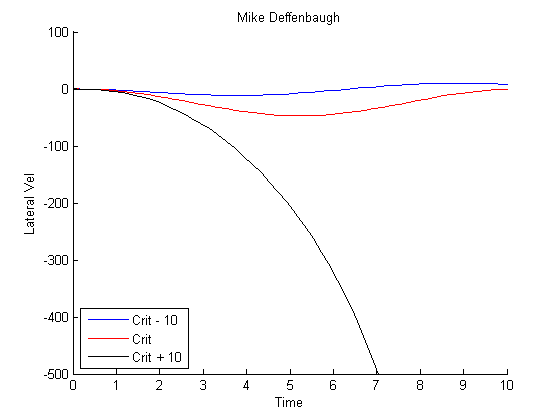
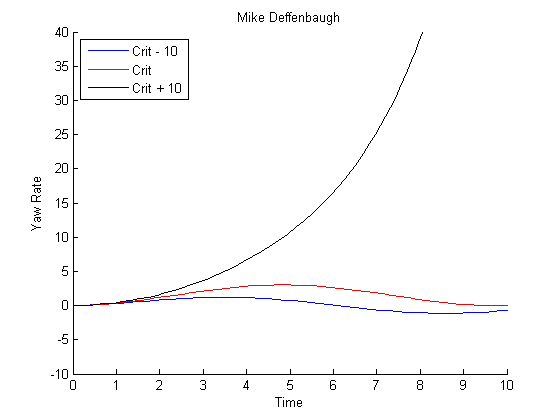
The particular model used in this simulation is not well suited to handle speeds above the critical speed as you can see from the mess that is created by the black line. In the next two graphs you can see that the vehicle traveling above the critical speed has an unstable lateral velocity and yaw.
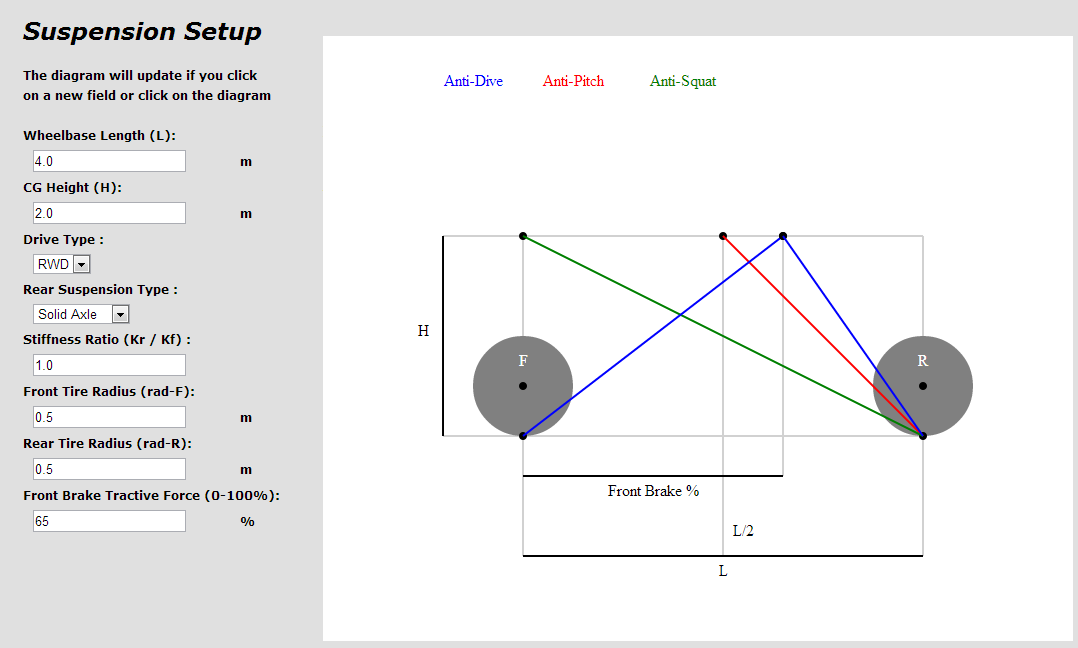
Additionally I made this page as my final project for my Vehicle Dynamics class. However you probably need the context of the class to be able to understand what everything means.